| People Involved | |
| Behzad Danaei, Arvin Rasoulzadeh, Alaleh Arian |
|
|
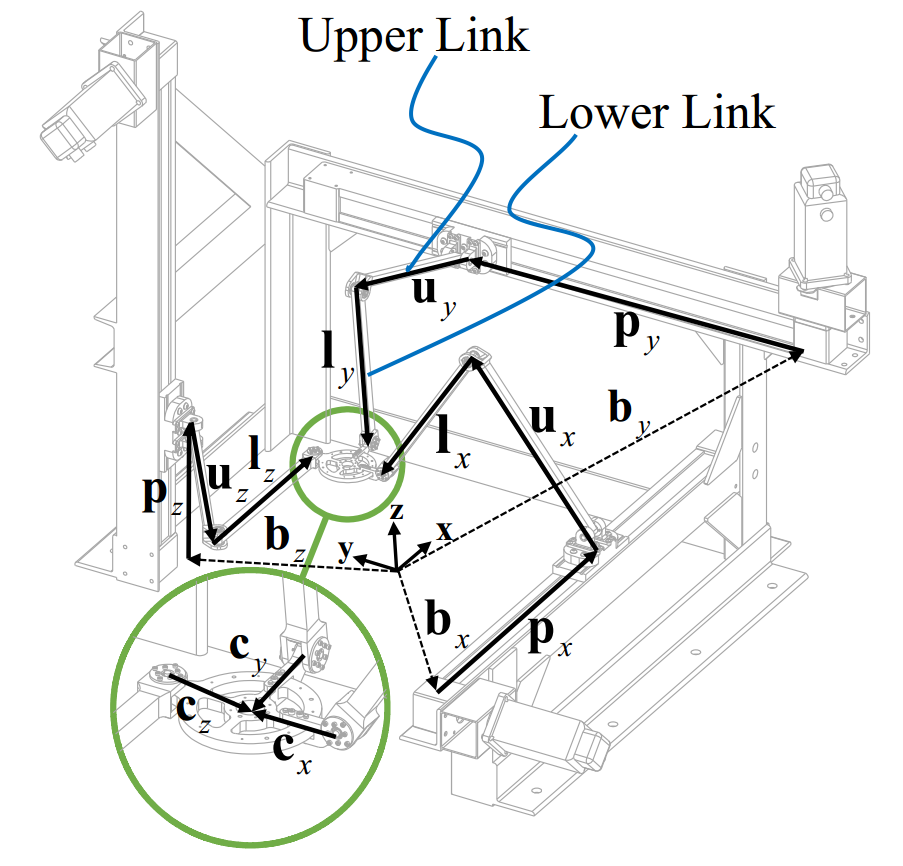
Human neck has a complex musculoskeletal structure with seven vertebrae and more than twenty muscles. One of the main functions of neck is controlling head movements. These movements are: head pan, head tilt and head swing. We are interested in simulating neck movements, via parallel manipulators. In this project we are hoping to achieve two main goals: |
 |
| People Involved | |
| Amirhossein Karimi |
|
|
Parallel robots play an important role in the industry nowadays, as witnessed by an increasing growth in a variety of their applications. However, the analyses of their kinematics, workspace, and singularities are of considerable complexity versus serial robots, as some of the problems in this field have been remained unsolved. Confrontation with singularities of parallel robots can be expressed in terms of three different approaches, namely: 1) synthesis considerations for designing mechanisms with fewer singularities 2) obtaining largest singularity-free zones within the workspace of the mechanisms to ensure the safety of these regions from singularity 3) to consider the singularity in the path generation procedure to obtain singularity-free paths. In this thesis, it is aimed at exerting analytical methods based on convex optimization to resolve problems caused by the singularities in the workspace of the mechanisms, including failure to implement control algorithms, collapse of mechanism configuration, and damage to the mechanical components of the robot. |
 |
| People Involved | |
| Behzad Danaei and Nima Karbasizadeh |
|
|
|
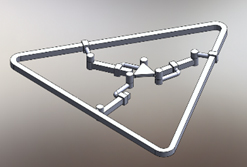
 A 3-RRR planar manipulator meshed with triangles in STL file. |
| People Involved | |
| Azadeh Droudchi, Mohammad Sharifzadeh, Mohsen Heydarzadeh |
|
|
The 3-RRR Planar Parallel Mechanism is designed, constructed and controlled in Human and Robot Interaction Laboratory. The focus is on experimental control methods using inverse kinematic problem in order to gain more accuracy and smooth movement during the control process. Since there is no direct feedback sensor on the end-effector, all the foregoing control approaches could be regarded as open-loop control. In order to control the mechanism, two main control methods are used namely, position control and speed control. A Joy-stick is added to the system, in order to provide the ability for the user to control the mechanism directly. In addition, a Graphical User Interface is designed to help the user by three main control states. The first state is considered as off-line control, in which, the mechanism will follow a specific path defined in the program. In the second state, off-line control via Joy-stick, the mechanism will follow a path specified by the user via Joy-stick. As the third state, which is considered as the on-line control via Joy-stick, the mechanism will interactively follow a path specified by the user via the Joy-stick. All the programs are written in Qt creator in order to speed up data transmission from computer to the mechanism’s actuators and vice versa. |
 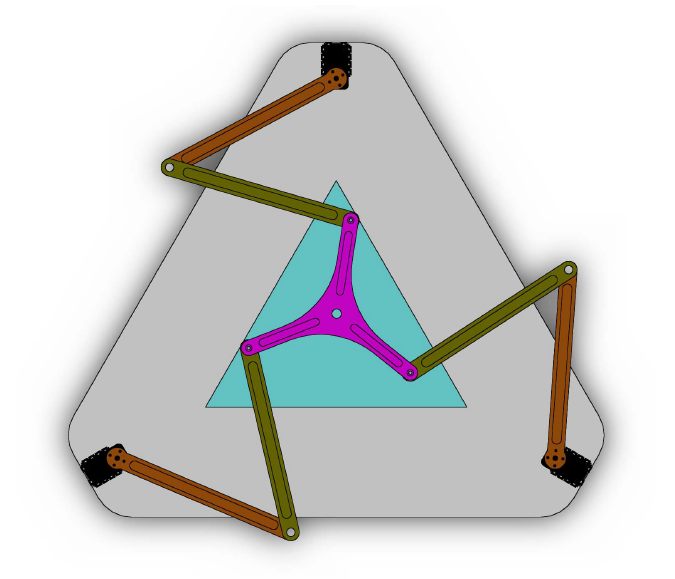 |
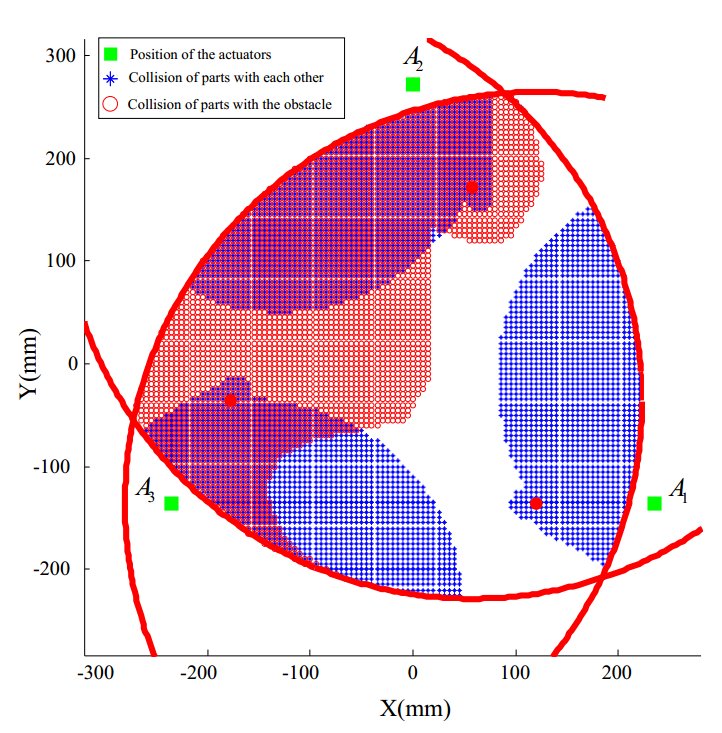
| People Involved | |
| Behzad Danaei and Alaleh Arian |
|
|
|
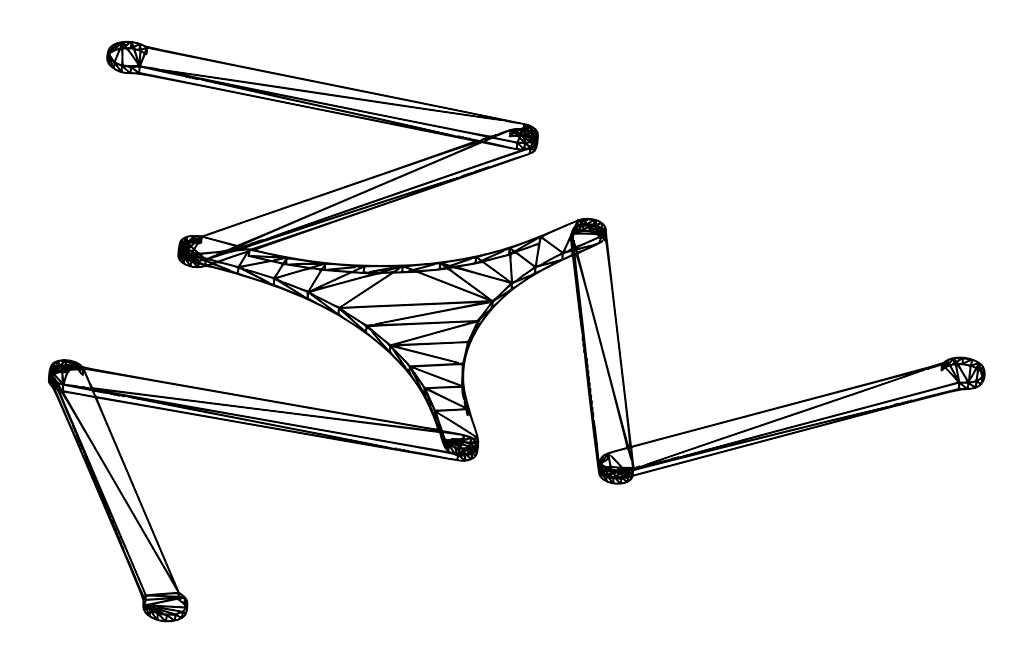
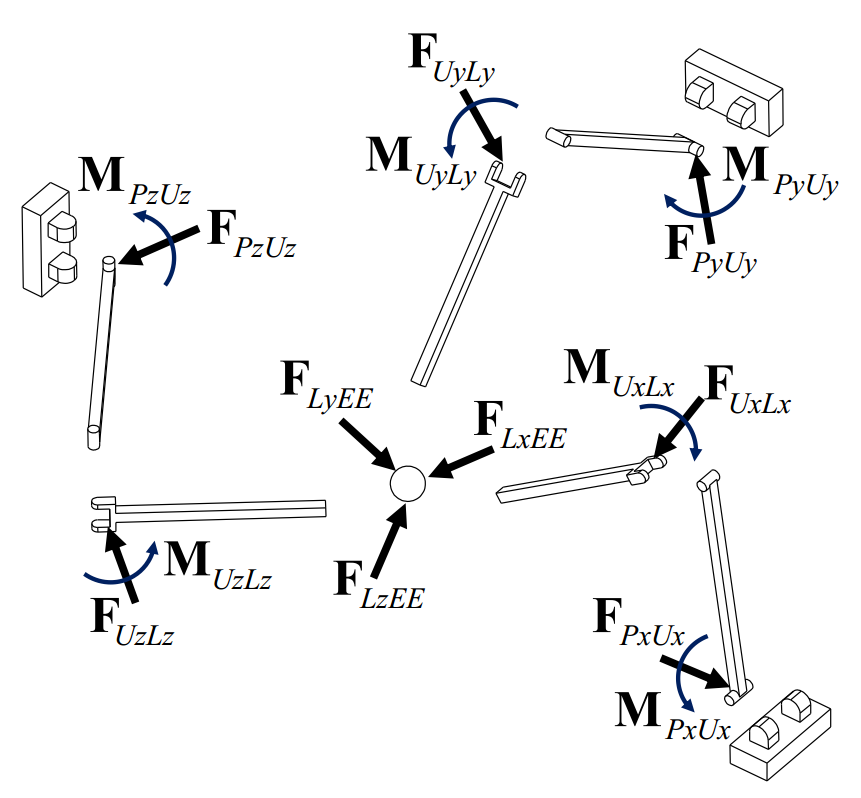 Free-body diagram of the Tripteron manipulator Free-body diagram of the Tripteron manipulator |