
| People Involved | |
| Mojtaba Yazdani, Roya Sabbagh Novin |
|
|
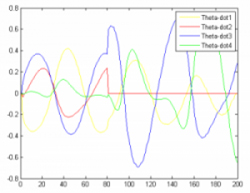
One of the challenging subjects in industrial serial manipulators context is controlling them to continue their tasks in the case of actuator faults. This is usually done considering minimum velocity jump in their end-effector and healthy joints. |
  |
| People Involved | |
| Roya Sabbagh Novin, Mojtaba Yazdani, Amirhossein Karimi |
|
|
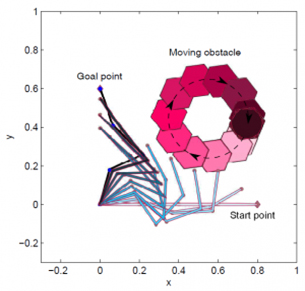
This project focuses on the optimal path planning of redundant planar serial robots, while avoiding obstacles within its workspace. A synergy-based algorithm between convex optimization, disjunctive programming and receding horizon is employed to the end of achieving advantages such as finding the global optimum solution and low computational time. For the purpose of the problem, different cost functions can be considered, including among others, transition time, energy usage or path length. In addition, kinematic and dynamic relations of the robots under study are expressed as constraints of the problem and since they are non-convex functions, they are approximated by convex constraints. |
 |
| People Involved | |
| Mojtaba Yazdani, Roya Sabbagh Novin |
|
|
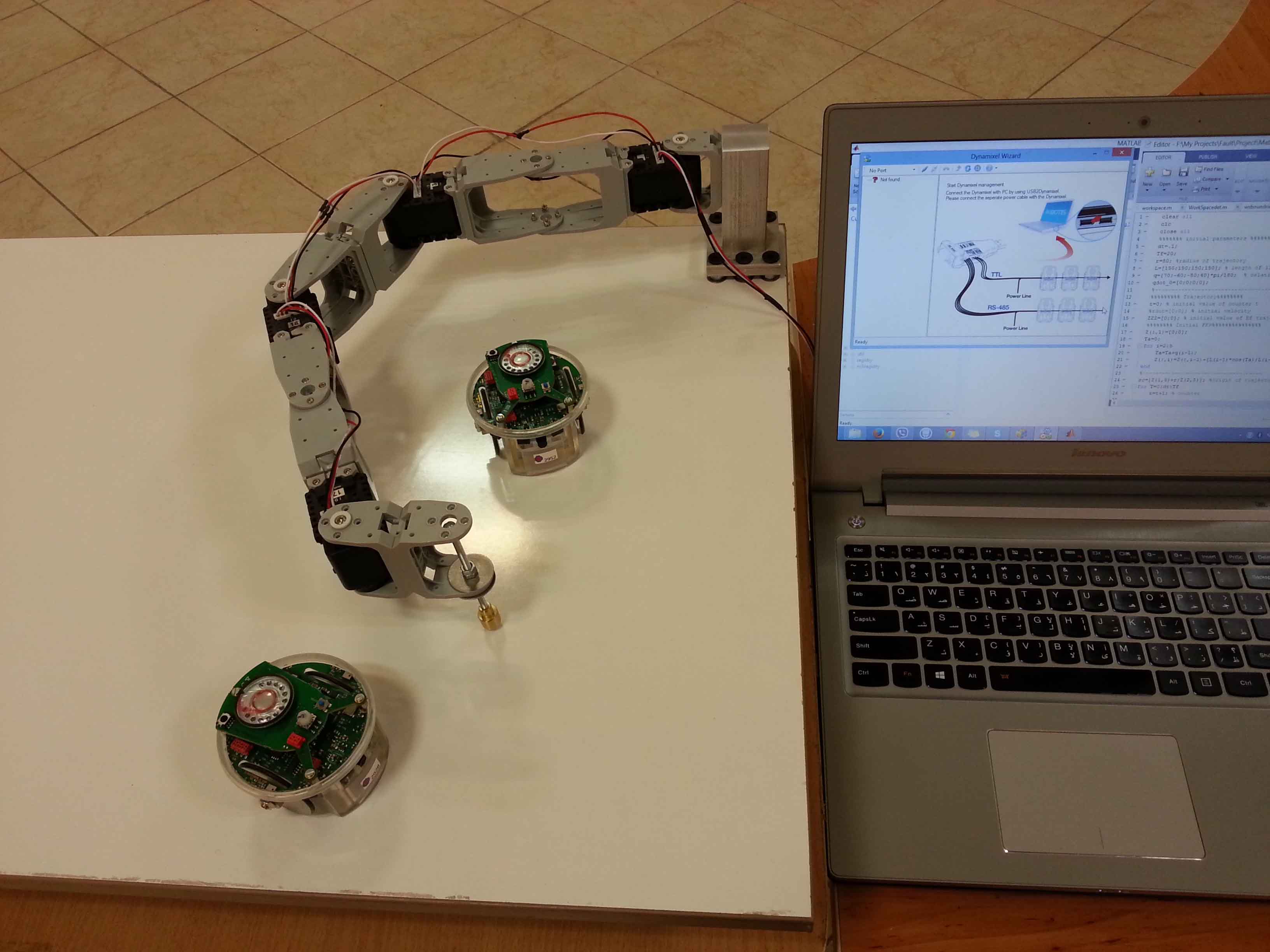
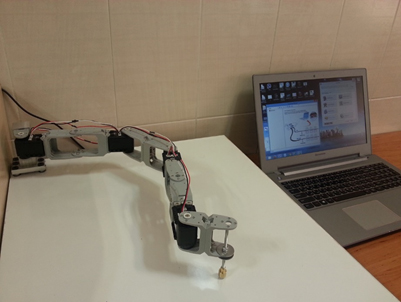
In order to have an experimental test platform for our optimal motion planning and fault tolerant control projects, a 4-DOF planar serial manipulator is developed. This manipulator contains four AX-12 Dynamixel actuators with good performance in position control which are connected to PC via a USB2Dynamixel card. |
 |
| People Involved | |
| Behzad Mehrafrooz |
|
|
In this investigation serial manipulators are studied via Open dynamics engine. |
 |