
| People Involved | |
| Hassan Bayani | |
|
Cable Driven Parallel Robots (CDPRs) are a class of parallel robots in which rigid links are replaced by cables. The cables are hinged to a Moving Platform (MP) in one side and from the other side they are connected to a motor for changing the lengths of the cables. The project deals with determining the maximal regions within the Wrench-Feasible Workspace (WFW) of CDPR using convex optimization. Also implementation in control of CDPR is involved. For the latter kinematic and dynamic equation of the CDPR is derived to form a control matrix. An online vision procedure is suggested in order to track the position of the MP for taking feedback. Classic and modern control approaches like PD controller, pole-placement, sliding mode, MPC methods is used. Also an adaptive controller involved with identification of the system in online manner for improving the performance of the controller is part of the research. |
 |

| People Involved | |
| Ali Aflakiyan , Hassan Bayani | |
|
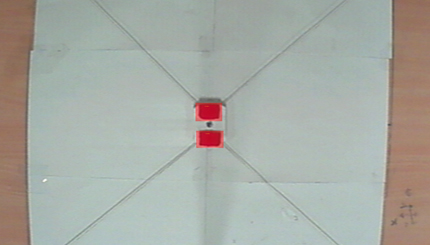
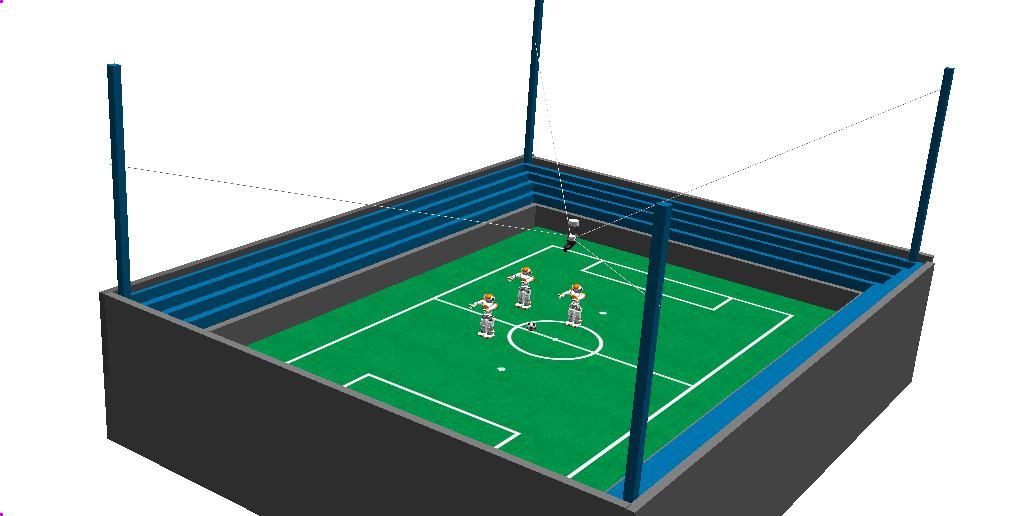
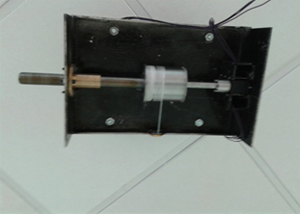
Cable Driven Parallel Robots (CDPRs) are a class of parallel robots in which rigid links are replaced by cables. The "Cable-driven parallel robots are classified into two parts: suspended ones and redundantly constrained ones. As for the suspended cable robots, the gravity is necessary to serve as the constant external force to control the end-effector’s degrees of freedom, while the redundantly constrained cable robots can control all the motions by cable forces only. Cable-suspended robots offer many advantages over. The main benefit of cable robots is their large workspace size, which makes them well suited for broadcasting, transporting and loading. Another benefits are being easy to reconfigure and implement, high speed motion, and high payload to weight ratio and have good accuracy. Since cables can only pull and not push the end-effector however, designing and controlling cable robots becomes more challenging. The cable-suspended robot in TaarLab can be used to make the camera move on 3D space and also enables the camera to move arbitrarily in the workspace and adjust its velocity in time by this strategies: An open-loop control to moving the end-effector by using joy steak. In addition, some prescribed trajectories which are given by the user by the latter joy steak should be performed by the end-effector. Object tracking vision-based control known as visual servoing. Sensor based tracking object by installing sensors on the ball or the players. Optimal trajectory planning and object tracking when following several object in such a way that the end-effector is in its optimal pose. It can be extended to use in stadiums, square, conferences, concerts and.... The main issue is to propose promising control approach which could be combined by vision and sensor feedbacks in a real time manner. |
 |
| People Involved | |
| Hassan Bayani, Ali Aflakiyan | |
|
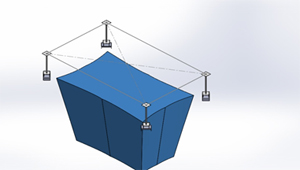
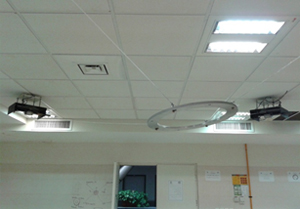
Cable-Suspended Parallel Robots (CSPR) can be considered as special parallel manipulators in which the end-effecter is supported by n cables with n tensioning motors. These robots can be made lighter, stiffer, safer, and more economical than traditional serial ones since their primary structure consists of lightweight and high load-bearing cables. On the other hand, one major disadvantage is that the cables can only exert tension and cannot push the endeffecter. Therefore, modeling, workspace analysis, and design of cable robots are much harder than conventional parallel manipulators. This project deals with kinematic and dynamic equation of the CSPR. Also online vision procedure using kinect or HD-CAM is suggested in order to track the position.Other sensors like infra-red and sonic are also utilized for improving the performance. Classic and modern control approaches like PD controller, pole-placement, sliding mode, MPC methods controller is part of the research. |
 |
| People Involved | |
| Mohammad Hadi Farzaneh , Saman Esfahani | |
|
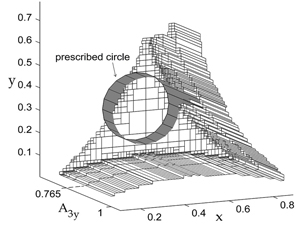
"This project deals with the dimensional synthesis of the workspace of a planar cable-driven parallel robot. The dimensional synthesis problem is made equivalent to an optimization problem which is solved by resorting to interval analysis. The workspace under study, namely the wrench-feasible workspace, consists in set of poses of platform for which a predefined wrench interval can be produced by means of set of cable tensions in an admissible range. The main contribution of this project consists in obtaining the optimum design of a cable-driven parallel robot, by having the position of one actuator, as optimization parameter. To do so, upon a convenient cost function, actuator location will be obtained for which the corresponding workspace would cover a prescribed circle. Moreover, in order to optimize the workspace, for a given wrench-feasible workspace of the robot, the maximal wrench-feasible workspace circle is found using an interval-based algorithm. |
 |