
| People Involved | |
| Mojtaba Zarei , Nima Karbasi | |
|
The purpose of a robotic system is to build up a representation of the real world using different kinds of sensors and then act on the real work to alter it to some useful end. A haptic system on the other hand stores a representation of a virtual and then the user acts on the haptic device. The haptic device then applies forces or torque to the user depending on their input to give the illusion they are interacting with. This project as a Grand National Project which is sponsored by Science and Technology deputy of Iran's Presidency Office aims at evaluating the use and benefits of haptic technology in the graduate dental curriculum in order to improve the quality of education and to ensure the treatment of dental diseases. Simulation-based training has the potential to address many of the issues above, as well as offering unique advantages such as offering a range of different anatomical and pathological examples to practice on. The main objective of this project is to obtain essential knowledge, analyze, identification based dynamic modeling and construct a prototype haptic device in order to simulate dental processes. Parallel and serial manipulators concept and even combination of them, which is referred to as hybrid mechanisms, are used for transferring force and torque to the user's hands for creating virtual sensing. Moreover, these kind of mechanisms could be categorized as multi body solid systems for which their dynamic analysis -where is a definite asset in the context of haptic devices- is a challenge. In order to find a solution to this problem, i.e., dynamic modelling of the developed haptic device, identification approaches should be applied. In development stage, one should find the best actuators which have both economic and scientific features for the developed device and incorporate the most promising and the best constructing methods for developing a haptic device. |
Figure taken from www.moog.com |

| People Involved | |
| Nima Karbasi, Mojtaba Zarei | |
|
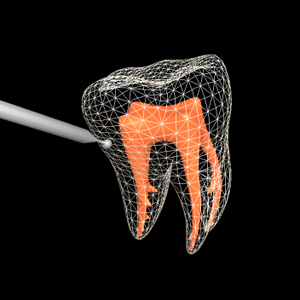
The haptic project in TaarLab is honored to be sponsored by Science and Technology deputy of Iran’s president. The goal of the project is developing a haptic device concentrated on training dentistry students. Project has been divided into two main sections: “Mechanical Design” and “Control and Visual Environment”. Objective of the Control and Visual Environment section consists in developing a novel visual environment in order to simulate the tooth drilling process compatible with the device designed in Mechanical Design section. Important tasks are visual rendering of drilling, collision detection and haptic rendering which consists in calculating the required force to be applied to the user’s hand. From control stand point, there are several methods for minimizing chattering, gravity compensation and increased stiffness of the haptic interface. Moreover, a user friendly graphical user interface should be developed in which the user can chose and manage the tools during the work and can be used as a document to evaluate the quality of the student. So far, a basic haptic enabled visual environment with ability to detect collision and calculate the force is developed and the project is in progress. |
 |