
| People Involved | |
| Arya Saboury, Ali Ravari | |
|
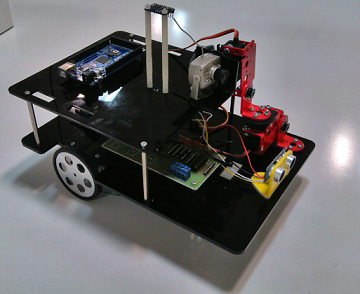
Designing open-source educational robots has a great impact on empowering engineers and those interested in mobile robots. In the last decade, different robots have been designed and built for this purpose. In this project, with the help of sensors available on a 9-axis open-source IMU and a robot based on open-source hardware and control software, a graphical user interface has been implemented to view the condition of motion variables in a real-time manner and combine sensor data. Moreover, by implementing different filter programs, such as low-pass filter, complementary filter and by using KF implementation and deliberation this mobile robot becomes suitable for improving the accuracy of the robot in extracting parameters required for localization, mapping and robot navigation. |
  |
| People Involved | |
| Roya Sabbagh Novin |
|
|
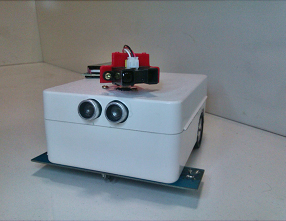
Mobile robots play an important role in human-robot interaction and they can be regarded as one of the major focused researches conducted in TaarLab. In this context, path planning plays an important role and various methods have been implemented so far, such as artificial potential fields. |
 |
| People Involved | |
| Amir Nasser Khaleghi, Siavash Boroumand | |
|
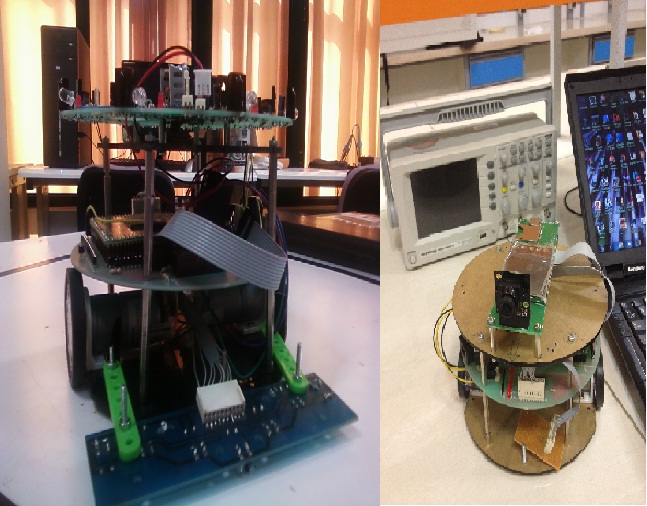
The main objective of this study was to evaluate and implementation of mobile robots in unknown environments. The strategy used in this project is the use of image processing techniques and BUG algorithm. In this study, using image processing algorithms robot, target and obstacles are identified, then the angle and distance from the robot to the target is calculated, The robot then rotate, move towards the target. If an obstacle on the way to deal with the obstacles avoidance algorithms passes and continues its path to the target. |
 |
| People Involved | |
| Siavash Boroumand, Arya Saboury ,Ali Ravari, Amir Nasser Khaleghi |
|
|
With application in the robotics and automation, more and more it becomes necessary the development of applications based on methodologies that facilitate future modifications, updates and enhancements in the original projected system. This project presents a conception of mobile robots using rapid prototyping, distributing the several control actions in growing levels of complexity and computing proposal oriented to embed systems implementation. This kind of controller can be tested on different platform representing the mobile robots using reprogrammable logic components (FPGA). This mobile robot will detect obstacle and also be able to control the speed. Different modules will be Actuators, Sensors, wireless transmission. All this modules will be interfaced using FPGA controller. I would like to construct a mechanically simple robot model, which can measure the distance from obstacle with the aid of sensor and accordingly should able to control the speed of motor. |
 |
| People Involved | |
| Navid Kashi, Pourya Shahverdi | |
|
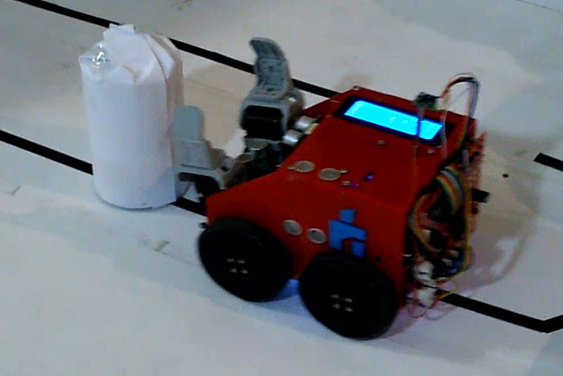
RoboCup Junior is a project-oriented educational initiative that sponsors local, regional and international robotic events for young students. It is designed to introduce RoboCup to primary and secondary school children, as well as undergraduates who do not have the resources to get involved in the senior leagues yet. The Junior League has three different competitions: Soccer, Dance and Rescue. In the junior rescue league robots identify victims within re-created disaster scenarios, varying in complexity from line-following on a flat surface to negotiating paths through obstacles on uneven terrain. Taarlab started junior projects with a Junior Rescue robot that has made by some talented students from National Organization for Development of Exceptional Talent (NODET) in Iran and other special high schools. The leader of the junior projects is Navid Kashi and this team is supervised by Pourya Shahverdi. The focus of the Junior League lies on education. Taarlab Junior-Rescue team was participated in the 2014 IranOpen Robocup and awarded the 3rd place in this competition, so this team has qualified for the 2014 International Robocup in the Joao Pessoa, Brazil. TaarLab has registered for this international competition, but unfortunately the students couldn't participate in this RoboCup. TaarLab is decided to participate in the next 2015 IranOpen RoboCup. |
 |