
| People Involved | |
| Pourya Shahverdi |
|
|
Imitation of human motions by a humanoid robot, like an avatar, is a very interesting and useful case study in the human and robot interaction field. This project is started at TaarLab and we are studying on the whole-body imitation methods considering implementation of novel kinematics solvers and optimization methods in order to make a real-time and correct motions on the robot. A 3-D Microsoft Kinect camera captures human image and some important points on joints of the human skeleton is marked using an openNI C++ library and these points position are available for kinematics operations on a NAO humanoid robot. The road map of this project is considering stability and perturbation rejecting on the whole-body motion imitation of the humanoid robots. This project is the master thesis of Pourya Shahverdi under supervision of Dr. Mehdi Tale Masouleh. |
 |
| People Involved | |
| Zeinab Farrokhi | |
|
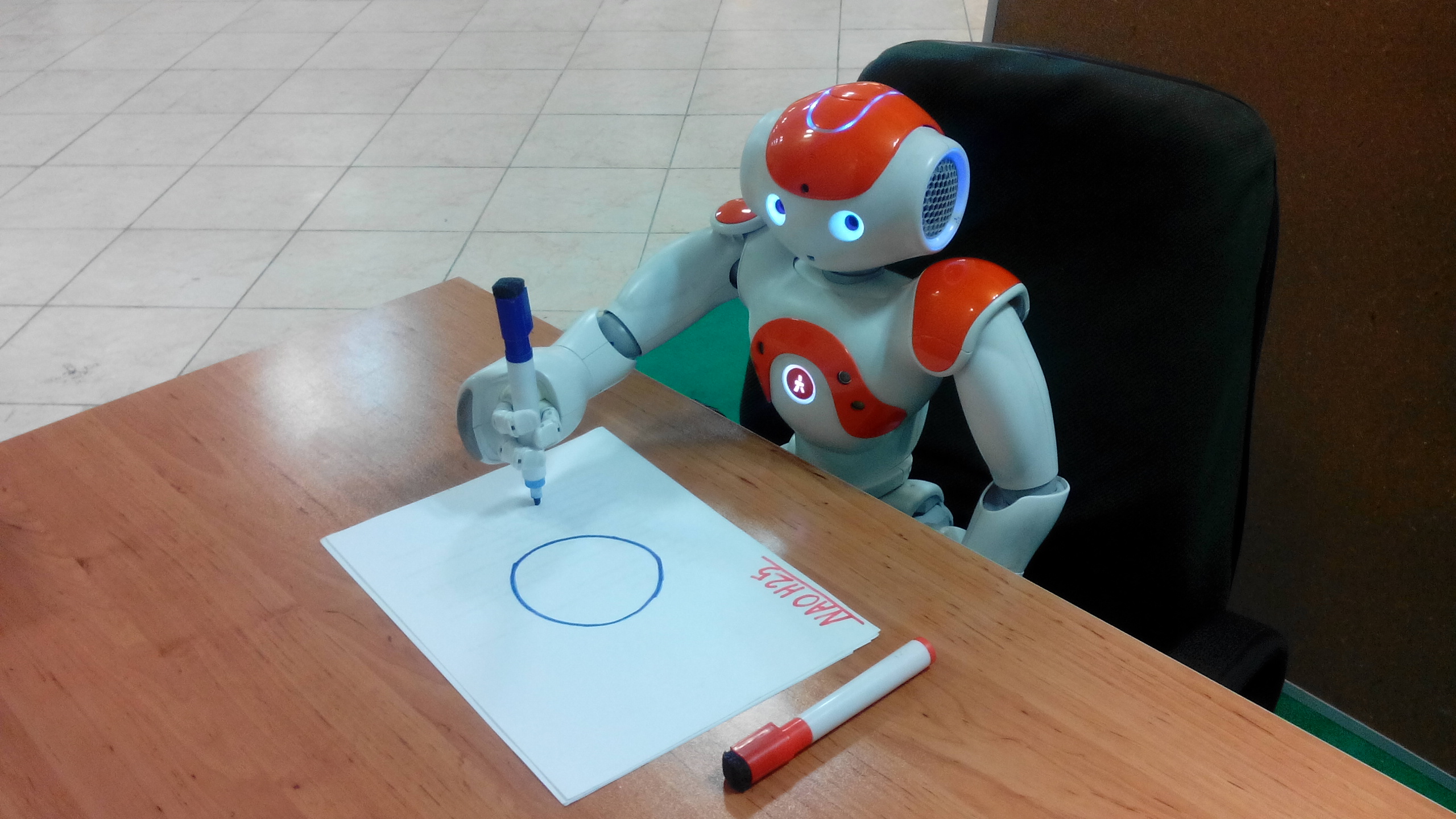
This project consists in proposing a neural-based approach for NAO H25 to be capable to draw artistic portraits. Our system takes an image as input and outputs a sketch that exhibits the drawing style of a set of training examples provided by an artist. Creating a portrait in the style of a particular artistic tradition or a particular artist is a difficult problem. Elusive to codify algorithmically, the nebulous qualities which combine to form artwork are often well captured using example-based approaches. The application is purely entertaining and based on existing tools for shape detection and image reconstruction, as well as classical tools for trajectory planning of a robot arm. the innovation of the application lies in the care we take to make the whole process as human-like as possible. The robot's motions and its drawings follow a style characteristic to humans. The behavior of the robot resembles that of an artist, who would, rst, analyze the shape of the model, and then, draw the portrait on a piece of paper. The robot may, also, ask for a pen and take it from the user. The application runs in real-time and is interactive. It uses existing tools for image processing, robot control,and neural network .The whole process is interactive, using speech recognition and speech synthesis to conduct the scenario. In this project the NAO arm is used as an intermediate to draw the captured picture. In addition, the vision is used in order to have a feedback for the performance of the Robot in order to improve the quality of the final result. |
 |
| People Involved | |
| Mohammad Ali Zakeri , Payam Ghasemi | |
|
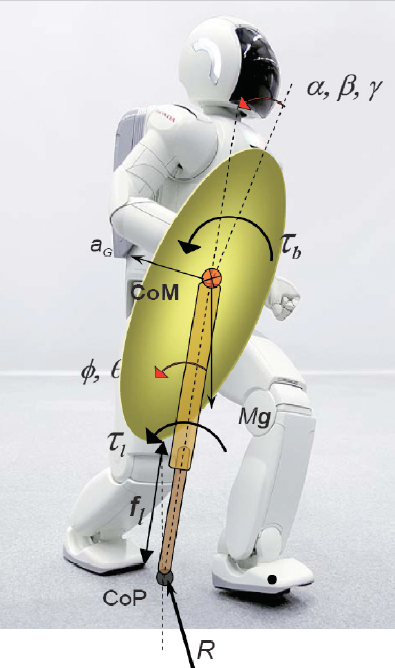
What is expected from future humanoid robots is their successful existence in our environment. This main requirement implies several difficulties in the form of balance maintenance, performing dynamic walking, and real time pattern generation. On the other hand, ordinary analysis and control strategies of fixed manipulators are inapplicable in ballistic humanoid robots, because of the highly nonlinear and complex dynamic structure of these robots. Consequently, oversimplified dynamic models, such as different variation of the inverted pendulum, have been imposed by researchers. These models, rather than considering the inherent dynamics of the humanoid robot, focus on the Centre of Mass of the robot and one Ground Reference Point, e.g. CoP(Centre of Pressure), ZMP(Zero Moment Point), FRI(Foot Rotation Indicator), or CMP(Centroidal Moment Pivot). The major drawback and limitation of these reduced biped models, is that they represent the entire biped robot as a concentrated mass located at the Centre of Mass and simply ignore how this mass is distributed over the entire body, i.e. they ignore the inertia properties of the robot, especially that of the upper body. This simplification is totally in contrast with the fact that humanoid robot’s state of balance is tightly related to its rotational equilibrium which, in turn, is dependent on the rate of change of its angular momentum. As a response to this lack of accuracy, the Reaction Mass Pendulum (RMP) model was proposed by researches, to take angular properties of the robot into account, and not to increase the complexity of the mathematical descriptions too much, all in one hand. This model together with its recent modifications are probably the first ring of the next chain of humanoid robot’s dynamic modeling and control. |
 |
| People Involved | |
| Payam Ghasemi | |
|
Some methods for balancing and external disturbance rejection for NAO H25 humanoid robot are being studied. The NAO humanoid H25 has various capabilities, such as four FSRs under each foot, accelerometers and gyroscope in comparison with other versions, which are essential to our study. As a first step, kinematics and dynamic models of NAO were developed. |
  |