
| People Involved | |
| Mohammad Sharifzadeh, Azadeh Droudchi | |
|
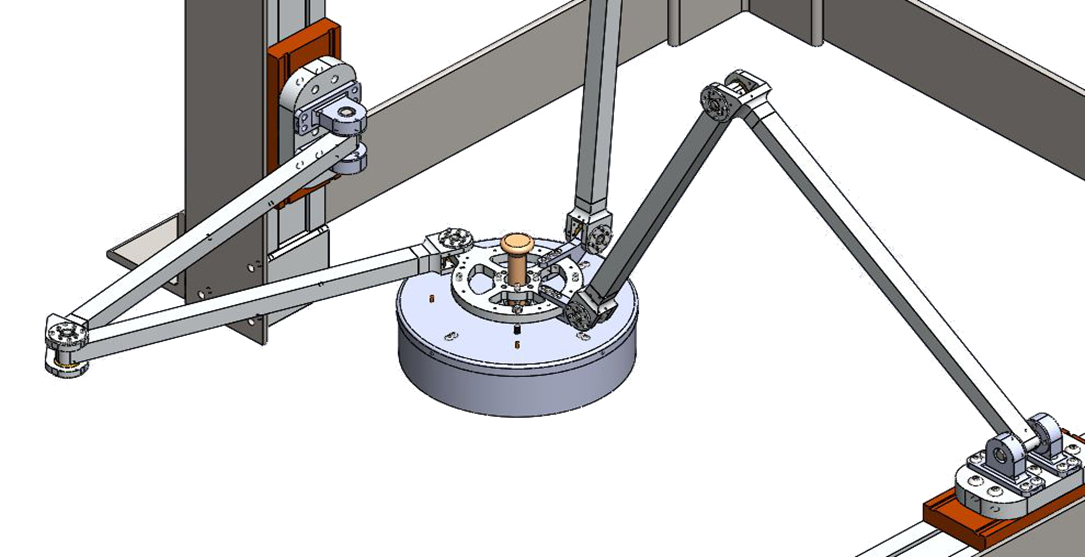
In Tripteron, as a decoupled parallel robot performing 3 translational motion, the main goal in HRI field is concerned with construction an HRI interface mounted on the End-Effector in which the amount and direction of force attended by the user’s hand is sensed, processed and sent to computer. This information would be the main input of dynamical control loops and the servo motors would be driven in such a way that the End-Effector of the robot would move through the desired direction where the speed is directly related to the amount of the applied force. The main sensor in this interface is Load-Cell which the resistance of its strain gauges is changed by attended stress. The construction of the HRI Interface, as a mechatronic problem, contains mechanical design and construction, design and construction of amplifier and filter circuit, usage of Micro Controllers as pre-processor, sending data through Bluetooth module a transmitter and main data processing in QT programming. |
 |
| People Involved | |
| Alaleh Arian |
|
|
Blinking and eye movement are one of the most important abilities that most people have, even people with spinal cord problem. By using this ability these people could handle some of their activities such as moving their wheelchair without the help of others. One of the most important fields in Human-Robot Interaction is the development of artificial limbs working with brain signals. The purpose of this project consists in detecting blinking and left and right eye movements via electroencephalogram signals which is also useful in determining sleepiness. Moving Window, Fast Fourier Transform and Wavelet Transform are the methods which are used in this project. Obtained results reveal that the most reliable method to recognize blinking and eye movements is Fast Fourier Transform since it is almost insensitive and invariant to the defined variables. After recognition of blinking and eye movement, these actions are transferred to a robot which is called the spherical 2-DOFparallel robot, built first at the Laval University. |
  |
| People Involved | |
| Arya Saboury |
|
|
For control robotics and mechatrnics systems a special glove is designed which cancontrol the robots by moving only two fingers and the wrist. Cheap and open source technology has also been used in TL-HCG(Taarlab-hand controlled glove) design. |
 |
| People Involved | |
| Milad Eyvazi Hesar |
|
|
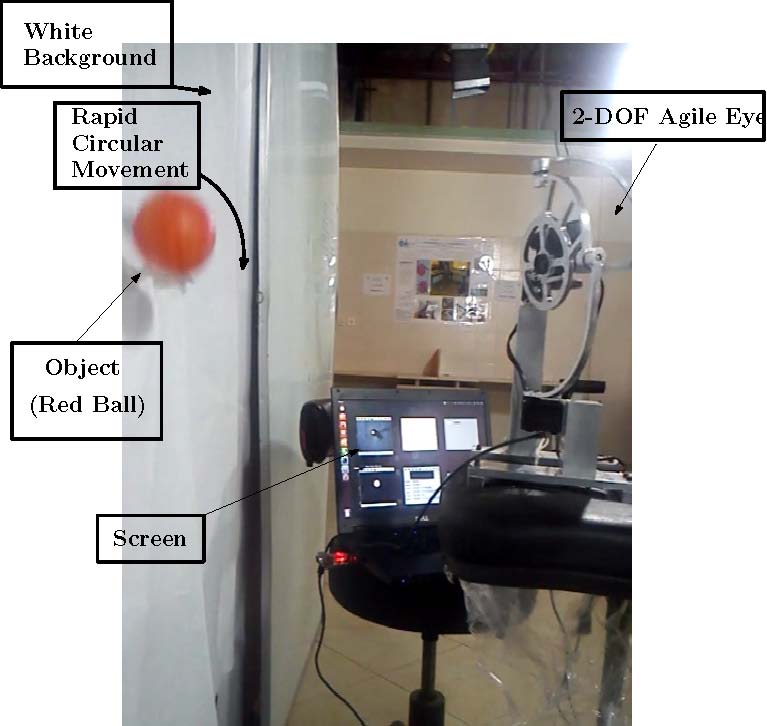
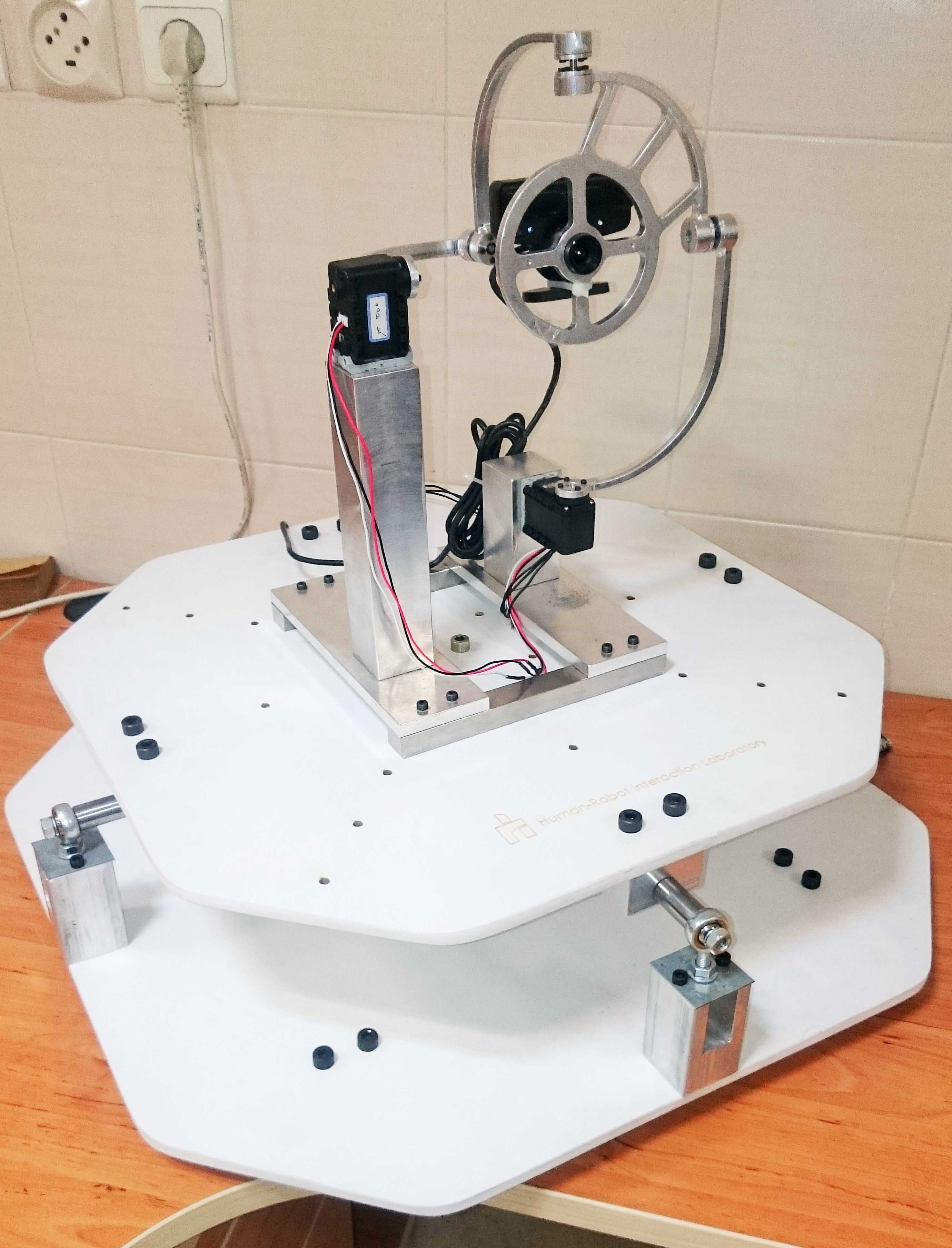
In this research, by means of the identified system derived from the common online recursive least square (RLS) method, 2 types of controllers, PID and Sliding mode Controller, were applied on the 2-DoF Agile Eye to track a ball. Some common algorithms in Image Processing (for for the purpose of color filteration, noise reduction and so on) were also hired to optimize ball detection in a common space with all noises and relatively close colors to the ball (also the other constrains forced from camera and even light in the environment). Furtheremore, an Auto Regressive(AR) model was used to predict the steps ahead of the ball movement to diminish the latency in response ,then approach to a relatively real-time system. Moreover, awared selection of existed C++ scripts and OpenCV libraries in this project, helped us to save time and never try to "reinvent a wheel again!". On another side, designing a GUI for this work was another barrior which finally ended up with a simple one just to show the all events together. As a conclusion, the results of this study were compared and published in ICROM 2014. |
|
| People Involved | |
| Alireza Safaryazdi |
|
|
Any robots after build and developed control systems must be tested on standard environment. |
  |